



HOGI Industrial Robotic Laser Welding Machine Robot
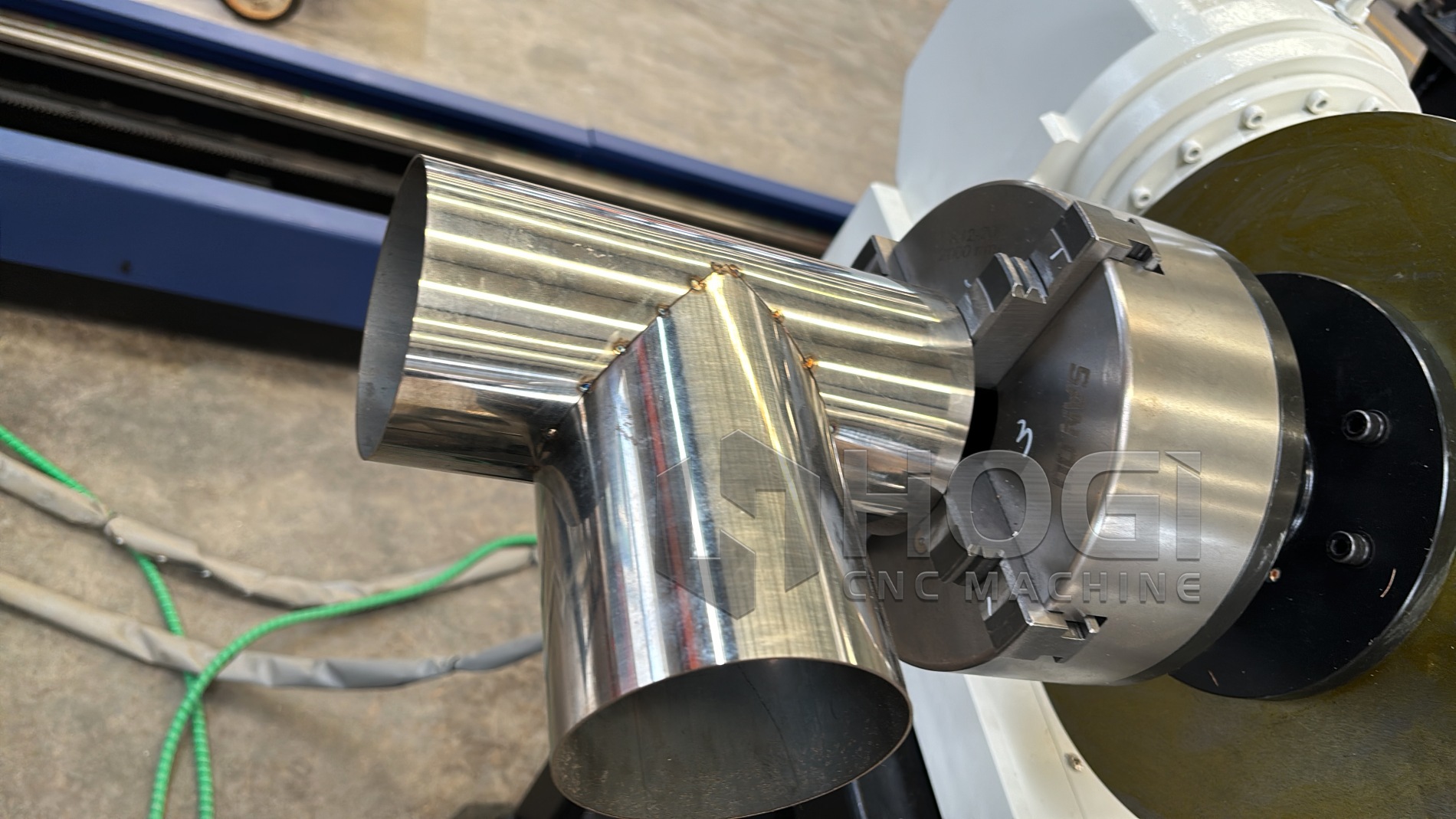
The duct laser welding robot is a highly automated and intelligent welding system designed for the manufacture of various types of ducts—such as rectangular ducts, round ducts, spiral ducts, and “shrimp-shaped” elbows—in fields including ventilation, air conditioning, cleanroom engineering, and nuclear power.
In traditional duct manufacturing, methods such as seam joining, manual arc welding, or TIG welding are commonly used, which suffer from issues such as easy burn-through of thin sheets, significant deformation, unsightly welds, low efficiency, and reliance on skilled labor. The introduction of laser welding robots has completely transformed this situation.
System Components
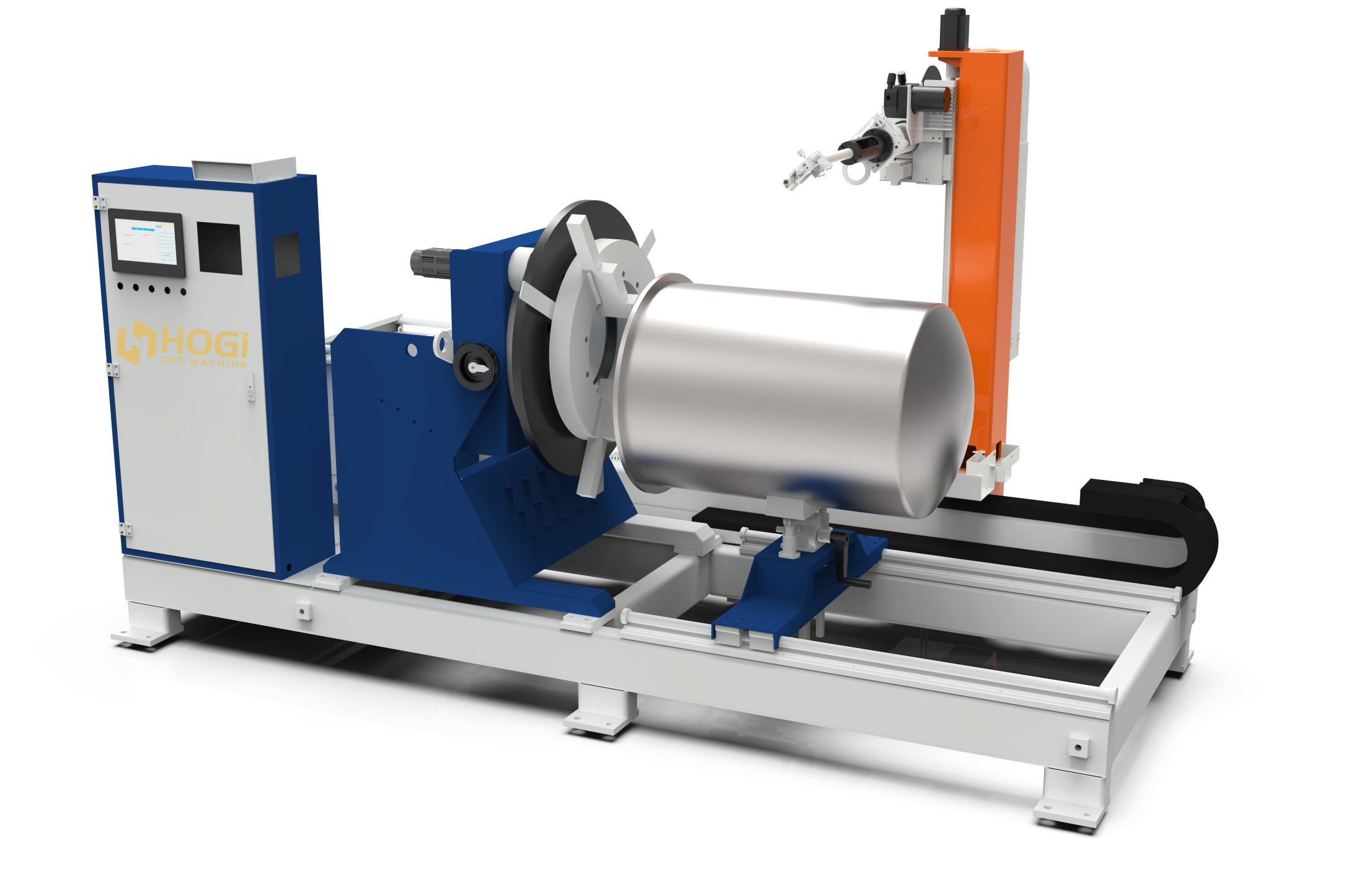
A typical duct laser welding robot workstation usually includes the following core components:
• Multi-axis industrial robot (base unit): Typically a five- or six-axis industrial robot is used, offering high flexibility and a wide working range.
• Laser welding system: Includes a high-power fiber laser, a laser welding head, and a wire feeding mechanism (as required by the process).
• Vision tracking and positioning system: This serves as the robot’s “eyes.” Using 3D laser vision sensors, it locates the weld seam before welding and tracks the seam in real time during the process, automatically correcting deviations caused by thermal deformation of the thin sheet metal.
• Fixtures and Positioning Devices: Air ducts are large-sized, thin-walled structures prone to deformation. Dedicated automated fixtures and multi-axis positioning devices (such as rotary tables) ensure the ducts are securely held in place and coordinate with the robot to achieve continuous multi-angle welding.
Core Technical Advantages
1. High Welding Quality with Minimal Deformation
Laser welding features extremely high energy density, resulting in a very small heat-affected zone (HAZ). For thin sheets commonly used in ductwork—such as galvanized steel, stainless steel, or carbon steel—it achieves **“deep penetration and fast welding”**. The welds are smooth, aesthetically pleasing, and free of slag, requiring virtually no secondary grinding, while effectively preventing the “wavy” thermal deformation common in thin-sheet welding.
2. High Level of Intelligence (Teach-Free/Minimal Teaching)
Due to the wide variety of duct specifications (with frequently changing dimensions) and numerous production batches, traditional manual teaching and programming are extremely cumbersome. Modern duct laser welding robots are typically equipped with a **“vision-guided + 3D offline programming system”**. Simply import the duct’s CAD/BIM drawings, and the system automatically generates welding paths; combined with vision sensors, the robot can automatically identify and align the weld seam even if the workpiece has dimensional tolerances.
3. High Speed, Doubled Efficiency
Laser welding speeds are typically 5 to 10 times faster than traditional manual arc welding or gas shielded welding. Additionally, robots can be configured for “one machine, multiple workstations”.








HOGI Intelligent Industrual Welding Robot
The core technology of HOGI welding robots is the intelligent operating system of industrial robot with completely independent intellectual property rights.
That is, through the industrial design software and 3D vision sensors to digitalize the metal structure parts, the use of artificial intelligence algorithms and digital technology to automatically generate work tasks and instructions, drive the robot body, external axes and generating equipment linkage, to achieve the whole process of intelligent production of metal structure products such as cutting, assembling, welding, testing, painting and so on.
Industrial robotic intelligent workstations assembled with intelligent operating systems are widely used in the manufacturing of metal structures in non-standard fields, such as ships, bridges, steel structures, building metal structure equipment, etc.
HOGI Robotics Intelligent Operating System (GBOS)
Functional overview
The system is a self-developed system, and its main function is to automatically generate the welding program by deeply integrating the welding process and then importing the three-dimensional model, locating the weld seam of the whole component through the vision system, and basing on the actual contour of the position in the model.
The software is deployed on a PC system, which can be placed at any location, and can be remotely controlled via TCP/IP protocol, i.e., it can directly operate the on-site equipment for welding in the office.
Creation of model – Creation of weld seam – Position determination – Intelligent matching of welding process – Generation of weld program file – Weld program file transfer – Robot execution of welding operation

Video
Tab Content